
В первой части мы занимались пайкой и переводили драйвера MCU на UART. Теперь настало время заставить их работать через Klipper.
Еще раз, отдельное спасибо Tom_Tomich
Все настройки на примере Flying Bear Ghost 6.
Выполняем команды и скачиваем конфигурационные файлы:
cd ~
git clone https://github.com/Datastore24Kirill/tmc_config.gitДалее определяем где у Вас находятся конфиги:
ls -la ~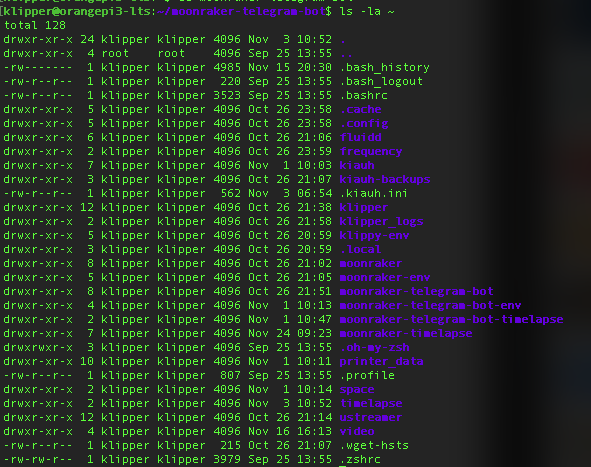
ВНИМАТЕЛЬНО посмотрите папки. Если вы нашли папку printer_data, внимательно проверьте нет ли папки klipper_config
Итак:
- Если папка printer_data и klipper_config есть обе, то используйте ВАРИАНТ 2 команды
- Если есть ТОЛЬКО папка printer_data, то используйте ВАРИАНТ 1
- Если есть ТОЛЬКО папка klipper_config, то используйте ВАРИАНТ 2
ВАРИАНТ 1
Выполняем команду:
sudo mv ~/tmc_config/tmc.cfg ~/printer_data/configЗапросит пароль вашего пользователя
ВАРИАНТ 2
sudo mv ~/tmc_config/tmc.cfg ~/klipper_configОткрываем браузер, вводи IP адрес принтера и попадаем в веб морду управления клиппер.
Открываем “Конфигурация, выбираем файл printer.cfg в самом вверху вставляем:
[include tmc.cfg]Опускаемся ниже и ищем раздел настройки наших моторов [stepper_x] [stepper_y] [extruder], и приводим его к следующему виду:
[stepper_x]
step_pin: PE3
dir_pin: !PE2
enable_pin: !PE4
microsteps: 16
rotation_distance: 40
endstop_pin: !PA15
position_endstop: 1
position_max: 255
homing_speed: 40
[stepper_y]
step_pin: PE0
dir_pin: !PB9
enable_pin: !PE1
microsteps: 16
rotation_distance: 40
endstop_pin: !PD2
position_endstop: 1
position_max: 220
homing_speed: 40
[extruder]
step_pin: PD6
dir_pin: PD3
enable_pin: !PB3
microsteps: 16
rotation_distance: 7.839
max_extrude_only_distance: 1400.0
nozzle_diameter: 0.400
filament_diameter: 1.750
heater_pin: PE5
sensor_type: Generic 3950
sensor_pin: PC1
#control: pid
#pid_Kp: 14.669
#pid_Ki: 0.572
#pid_Kd: 94.068
min_temp: 0
max_temp: 320
pressure_advance = 0.022
ВАЖНО! Тонкие настройки, такие как тип термистора, PIDS, PA/LA вписываем свои, которые использовались до перехода на UART или начинаем калиброваться.
Жмем “Сохранить и перезагрузить”. Проверяем движение моторов.
Перезагружаем одноплатник через консоль:
sudo rebootДожидаемся загрузки.
Если вы все сделали правильно, то наслаждаемся звуком моторов